






109學年度第十次電機工程學系電子科技講座/飛行控制與淺談 龔志銘 副教授 實踐大學資訊科技與通訊系 (輔大電子系第11屆系友)


 講題: 飛行控制與淺談
講題: 飛行控制與淺談主講: 龔志銘 副教授 實踐大學資訊科技與通訊系 (輔大電子系第11屆系友)
地點: 109年12月11日(星期五) 下午01:40 ~ 3:30,聖言樓電機系一樓 SF132教室
紀錄: 李柏衛
今天的科技講座邀請到輔大電子系第11屆系友龔志銘學長來為學弟妹們演講。龔志銘學長今天要為大家介紹無人機的運用與群飛。首先,龔學長先做一個簡單的自我介紹,他是實踐大學資訊科技與通訊系副教授,同時也是交通部民航局遙控無人機學科審查委員及術科考官。龔志銘學長也特別贈送兩台無人無人機贈送給學生當獎勵。
無人機主要可以分為3種,第一種是UAV:無人飛行載具(Ummamned Aerial Vehicle),具自動導航系统(Unmamned AerialSystem,UAS)像是空拍機、全球鹰等...。另外一種是RPV:遠端遙控載具(Remote Pilot Vehicle),非自動導航像是航空模型、遙控飛機。最後一種則是智慧飛行機器人(Aerial Robot)。
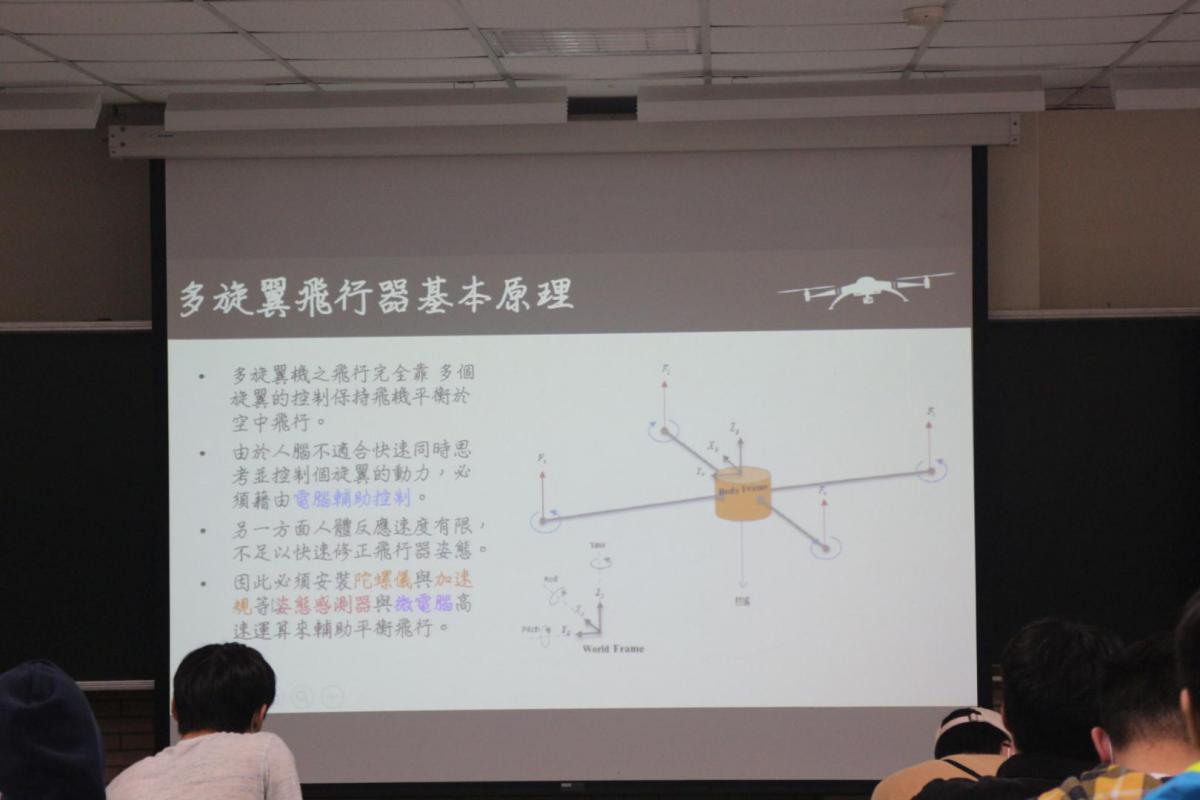
接著,龔志銘學長開始講述多旋翼飛行器的基本原理。多旋翼機之飛行完全靠多個旋翼的控制保持飛機平衡於空中飛行。由於人腦不適合快速同時思考並控制個旋翼的動力,必須藉由電腦輔助控制。另一方面人體反應速度有限,不足以快速修正飛行器姿態。因此必須安裝陀螺儀與加速規等姿態感測器與微電腦高速運算來輔助平衡飛行。多旋翼飛行器的控制順序為姿態控制、運動速度控制、位置控制。飛行器的類型分為單軸飛行器及多軸飛行器,多軸飛行器一般為4軸、6軸或8軸。一套飛行器的組件主要為電池、RC傳輸器、RC接收器、GPS模組、控制軟體、馬達、螺旋槳等。
今天聽完龔志銘學長的演講後,讓我更加地瞭解無人機的構造及飛行原理,相信學弟妹們也是如此。或許系上也可以開立此相關課程,培養更多與無人機相關的人才。
更 多 圖 片
 IMG_4654.JPG
IMG_4654.JPG
 IMG_4655.JPG
IMG_4655.JPG
 IMG_4656.JPG
IMG_4656.JPG
 IMG_4646.JPG
IMG_4646.JPG
 IMG_4658.JPG
IMG_4658.JPG
 IMG_4660.JPG
IMG_4660.JPG
 IMG_4644.JPG
IMG_4644.JPG
 IMG_4649.JPG
IMG_4649.JPG
 IMG_4650.JPG
IMG_4650.JPG
 IMG_4651.JPG
IMG_4651.JPG
 IMG_4652.JPG
IMG_4652.JPG


